































Для создания эффективного роя роботов нужно научить их работать сообща над решением сложных практических задач — но чтобы при этом ни анализ ситуации, ни результат не зависели от состояния отдельной особи. Проще говоря, нельзя назначить среди роботов командира и бригадиров для управления остальными, так как в случае их гибели или ошибки работа будет провалена. В поисках решения исследователи из Гарварда решили скопировать природный вариант – систему взаимодействия муравьев.
Рабочий муравей умеет трудиться, но сам по себе не определяет, где и к чему ему приложить усилия. Но так и нужно, потому что его первоочередная задача – забота о муравейнике, а не о собственных нуждах. Поэтому муравьи постоянно контактируют друг с другом с помощью усиков и перемещаются вдоль следов из феромонов, чтобы находить места скопления других муравьев. Где все собрались – там и самая важная на текущий момент работа.
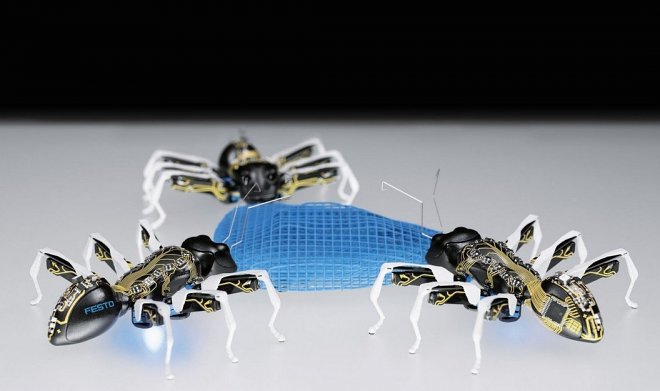
В эксперименте ученые поместили группу муравьев в ловушку в виде клетки со стенками из песка. Некоторые муравьи спонтанно принимались копать ее в разных местах, но их усилий было мало. Однако когда муравьи собирались в одном месте, они без труда прокапывали выход наружу. По мотивам эксперимента были созданы примитивные «робомуравьи», которые могли ползать, перемещать имитаторы песчинок и оставлять световой след на поверхности.
Робомуравьи получили всего три указания. Во-первых, не сталкиваться друг с другом. Во-вторых, перетаскивать песчинки из областей с ярким световым следом в темные. В-третьих, самим следовать из темных зон в светлые. Через некоторое время робомуравьи, сами того не понимая, успешно разобрали барьер и оказались на свободе. Данный алгоритм может пригодиться для программирования роев роботов сообща решать сложные задачи с минимальными затратами вычислительной мощности.





